Robotersysteme für menschenfeindliche Umgebungen
Start eines Kompetenzzentrums am KIT
Anzeigen



Müssen chemisch verseuchte Areale saniert oder kerntechnische Anlagen zurückgebaut werden, sind die Arbeiter – allen Vorsichtsmaßnahmen und Schutzausrüstungen zum Trotz – erheblichen Gesundheitsrisiken ausgesetzt. Künftig sollen Robotersysteme solche Dekontaminationsarbeiten ausführen, damit Menschen der Gefahrenzone fernbleiben können. An der Verwirklichung dieser Vision arbeitet das neue Kompetenzzentrum „ROBDEKON“, an dem Forscherinnen und Forscher des Karlsruher Instituts für Technologie (KIT) beteiligt sind und das vom Bundesministerium für Bildung und Forschung (BMBF) mit zwölf Millionen Euro gefördert wird.
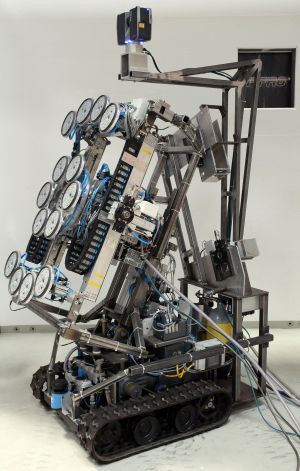
Der am KIT entwickelte Manipulator misst die radioaktive Belastung von Oberflächen, dekontaminiert sie und misst erneut.
Patrick Kern, KIT
ROBDEKON steht für „Robotersysteme für die Dekontamination in menschenfeindlichen Umgebungen“ und ist der Erforschung von autonomen oder teilautonomen Robotersystemen gewidmet. Es wird vom Fraunhofer-Institut für Optronik, Systemtechnik und Bildauswertung IOSB koordiniert. Als Forschungsinstitutionen sind neben den Standorten Karlsruhe und Ilmenau des Fraunhofer IOSB auch das Karlsruher Institut für Technologie (KIT), das Deutsche Forschungszentrum für Künstliche Intelligenz (DFKI) und das FZI Forschungszentrum Informatik, der Innovationspartner des KIT, beteiligt. Industriepartner im Konsortium sind die Götting KG, die Kraftanlagen Heidelberg GmbH, die ICP Ingenieurgesellschaft Prof. Czurda und Partner mbH und die KHG Kerntechnische Hilfsdienst GmbH.
ROBDEKON ist das erste Kompetenzzentrum für Robotersysteme in menschenfeindlichen Umgebungen und wird durch das BMBF im Rahmen des Programms „Forschung für die Zivile Sicherheit“ seit Mitte Juni 2018 gefördert. Die Laufzeit erstreckt sich über zunächst vier Jahre, Ziel ist jedoch, dass das Kompetenzzentrum langfristig weiterbesteht.

Multisensorielle Umwelterfassung und Bewegungsplanung
„Unser Konsortium vereint herausragende Expertise aus den Bereichen Robotik, Altlastensanierung und Rückbau kerntechnischer Anlagen“, sagt der Sprecher des Kompetenzzentrums ROBDEKON, Professor Jürgen Beyerer. Er ist Professor für Informatik am KIT und gleichzeitig Institutsleiter des Fraunhofer IOSB. „Wir werden nun die Forschung an multisensorieller Umwelterfassung, Algorithmen für die Bewegungsplanung und Telepräsenztechnologien systematisch vorantreiben. Damit können Roboter Dekontaminationstätigkeiten selbstständig durchführen, während Menschen von einem sicheren Leitstand aus die Arbeiten koordinieren, überwachen und bei schwierigen Aufgaben ferngesteuert eingreifen.“
Beim Stichwort Roboter dürfe man allerdings weder an klassische Industrieroboter noch an menschenähnliche (humanoide) Roboter denken, erläutert Beyerer: „Wir setzen auf innovative Konzepte wie zum Beispiel Kletterroboter oder automatisierte Baumaschinen.“
Die Projektpartner verfügen über verschiedene, sich ergänzende Labore, die in den kommenden Jahren erweitert, vernetzt und für externe Interessenten zugänglich gemacht werden sollen. Mithilfe von Anwendern und Industriepartnern sollen vielversprechende Ansätze aus der Forschung im Rahmen von ROBDEKON in praxistaugliche Systeme umgesetzt werden. Als zentrale Anlaufstelle für alle Anfragen zum Thema roboterbasierte Dekontamination wird am Fraunhofer IOSB ein Koordinationsbüro des Kompetenzzentrums eingerichtet.
Fraunhofer IOSB: Algorithmen-Toolbox und autonomer Bagger
Wissenschaftlich wird sich das Fraunhofer IOSB darauf konzentrieren, Autonomiefähigkeiten für Baumaschinen weiterzuentwickeln –ein Bereich, in dem das Institut über langjährige Erfahrung verfügt: „Wir bringen insbesondere unsere Algorithmen-Toolbox für autonome mobile Robotersysteme in ROBDEKON ein“, erklärt der zuständige Abteilungsleiter Christian Frey. „Sie ermöglicht es, in unwegsamem Gelände zu navigieren, Hindernissen auszuweichen und Manipulatoren zu steuern – damit etwa eine Baggerschaufel auch tatsächlich verseuchtes Material aufnimmt und an der gewünschten Stelle wieder ablädt.“
Das Institut verfügt bereits über mehrere geländegängige Roboterfahrzeuge sowie einen ersten automatisierten Bagger. Christian Frey: „Nun geht es darum, diese Autonomiefähigkeiten auf weitere Maschinen zu übertragen und sie noch flexibler, leistungsfähiger sowie leichter handhabbar zu machen.“
KIT: Dekontamination, Telepräsenz und Living-Lab
Einen Schwerpunkt der Arbeiten am KIT bilden Robotersysteme, die Dekontaminationsarbeiten zum Beispiel in Kernkraftwerken autonom oder halbautonom leisten können. Forscherinnen und Forscher am Lehrstuhl für Hochperformante Humanoide Technologien (H²T) und im Forschungslabor für Intelligente Prozessautomation und Robotik (IPR) entwerfen und bauen Robotersysteme, die verstrahlte sowie biologisch oder chemisch verunreinigte Oberflächen oder Anlagenteile reinigen oder abbauen können. Dazu gehören die Entwicklung von Methoden zur dreidimensionalen Umgebungserfassung, zur Inspektion des Arbeitsumfeldes sowie zum Planen und Ausführen von Dekontaminationsaufgaben wie dem Entfernen gefährlicher Verunreinigungen von Objekten oder Flächen und nicht zuletzt das Programmieren der entsprechenden Steuerungssoftware.
Überwacht und gesteuert werden diese Geräte mit Techniken der Telepräsenz, die am Lehrstuhl für Intelligente Sensor-Aktor-Systeme (ISAS) entwickelt werden. Dabei vertritt ein sogenannter Teleoperator, etwa ein Roboter, den Nutzer vor Ort in gegebenenfalls weit entfernten menschenfeindlichen Umgebungen. Dieser kann zum Beispiel Kopfbewegungen des Nutzers nachvollziehen und dann entsprechende Kamerabilder übertragen. Außerdem werden am ISAS Verfahren untersucht, um Verteilung und Intensität der Schadstoffbelastung zu messen und zu visualisieren, sodass Einsätze so effizient wie möglich durchgeführt werden können.
Am Institut für Technologie und Management im Baubetrieb (TMB) schließlich entsteht ein Living-Lab, in dem die Roboter in verschiedenen realistischen Umgebungen getestet und für die Arbeit in Kernkraftwerken ertüchtigt werden. Darüber hinaus wird am TMB an einem speziellen Roboter gearbeitet, der insbesondere Betonoberflächen auf gefährliche Verunreinigungen untersuchen, diese erfassen und schließlich beseitigen kann. Im letzten Schritt untersuchen die Wissenschaftler, wie die neuen Methoden und Geräte ganz praktisch auf Deponien oder belasteten Arealen eingesetzt werden können.
FZI: Kraftbasiertes Gefahrenstoffhandling und Augmented Reality
Das FZI Forschungszentrum Informatik wird im Kompetenzzentrum ROBDEKON kraftbasierte Manipulationsstrategien für mobile Roboter entwickeln. Diese werden in der Lage sein, den Menschen auch in schwierigem Gelände und im Umgang mit unbekannten Objekten beim Rückbau, Freimessen oder der Bergung kontaminierter Gegenstände teil- oder vollautonom zu unterstützen. FZI-Wissenschaftler Arne Rönnau erklärt: „Das FZI verfügt bereits über eine große Expertise in der Entwicklung kraftbasierter Robotik-Lösungen. Wir freuen uns, dass wir dieses Wissen nun in das ROBDEKON Kompetenzzentrum einbringen und damit gesundheitskritische Arbeiten für den Menschen sicherer machen können.“
Teil der Projektarbeit ist zudem eine detaillierte dreidimensionale Kartierung der Umgebung sowie die Integration effizienter Navigationsalgorithmen. Diese Aufgabe, ebenso wie die Entwicklung intuitiver, klarer Bedienkonzepte für die Mensch-Roboter-Interaktion, übernimmt das FZI. Dabei setzen die Karlsruher Wissenschaftler auch auf den Einsatz neuer Augmented-Reality- und Virtual-Reality-Systeme zur direkten Integration von wichtigen Umgebungsinformationen in die dreidimensionalen Darstellungen.
DFKI: Roboter für extreme Umgebungen und hybride Teams
Das Robotics Innovation Center des Deutschen Forschungszentrums für Künstliche Intelligenz (DFKI) unter Leitung von Professor Frank Kirchner bringt in das Kompetenzzentrum ROBDEKON seine langjährige Expertise in der Entwicklung mobiler autonomer Roboter speziell für den Einsatz in menschenfeindlichen und extremen Umgebungen wie dem Weltraum oder der Tiefsee ein. Um die notwendige Autonomie und damit die Handlungsfähigkeit der Systeme zu erreichen, müssen in dekontaminierten Gebieten eingesetzte Roboter ganz ähnliche Anforderungen erfüllen, insbesondere hinsichtlich ihrer Mobilität, Robustheit sowie ihrer Lernfähigkeit (Künstliche Intelligenz).
Der DFKI-Forschungsbereich verfügt über umfassende Kompetenzen in den Bereichen Maschinelles Lernen, Teleoperation und Mensch-Roboter-Kollaboration, um im Rahmen von Rückbau- und Dekontaminationsvorgängen die sichere Zusammenarbeit von Mensch und Roboter in hybriden Teams zu gewährleisten. Das Robotics Innovation Center wird in ROBDEKON neuartige Robotersysteme weiterentwickeln, welche die für dieses anspruchsvolle Einsatzgebiet notwendigen Fähigkeiten besitzen.




Weitere News aus dem Ressort Wissenschaft




















Diese Produkte könnten Sie interessieren