Selbstfahrende Mikroroboter
Anzeigen



Die meisten synthetischen Materialien, einschließlich derjenigen in Batterieelektroden, Polymermembranen und Katalysatoren, bauen sich mit der Zeit ab, da sie keine internen Reparaturmechanismen haben. Wenn Sie autonome Mikroroboter in diesen Materialien verteilen könnten, dann könnten Sie die Mikroroboter nutzen, um kontinuierlich Reparaturen von innen durchzuführen. Eine neue Studie aus dem Labor von Kyle Bishop, Associate Professor of Chemical Engineering, schlägt eine Strategie für Mikroroboter vor, die Symptome eines Materialfehlers erkennen und autonom zur Fehlerstelle navigieren können, wo Korrekturmaßnahmen durchgeführt werden können.
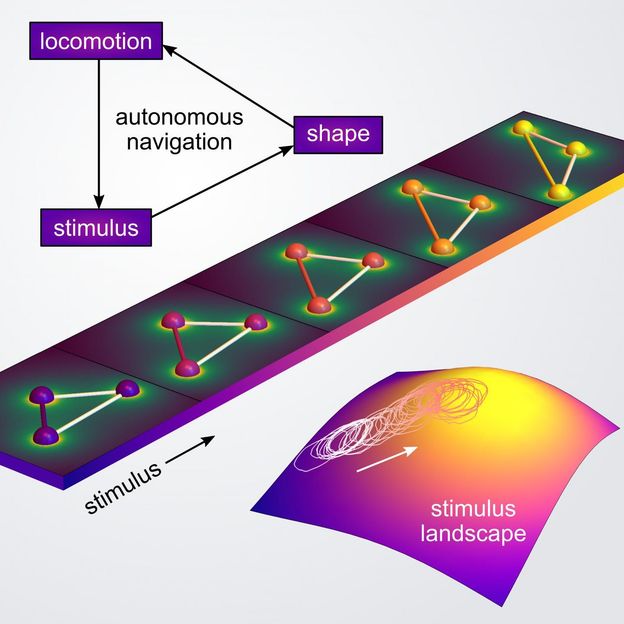
Dies ist ein Schema des autonomen Navigationsmechanismus durch Shapeshifting.
Yong Dou/Columbia Engineering
Schwimmende Bakterien suchen durch die Integration von chemischen Sensoren und Molekularmotoren nach Regionen mit hoher Nährstoffkonzentration, ähnlich einem selbstfahrenden Auto, das Informationen von Kameras und anderen Sensoren verwendet, um eine geeignete Aktion auszuwählen, um sein Ziel zu erreichen. Forscher haben versucht, dieses Verhalten nachzuahmen, indem sie kleine Partikel verwendeten, die von chemischen Kraftstoffen oder anderen Energieträgern angetrieben werden. Während räumliche Variationen in der Umgebung (z.B. in der Kraftstoffkonzentration) dazu dienen können, das Partikel physikalisch zu orientieren und damit seine Bewegung zu lenken, hat diese Art der Navigation Grenzen.
"Bestehende selbstfahrende Partikel sind eher wie ein entlaufener Zug, der mechanisch von den Wendeschienen gesteuert wird, als ein selbstfahrender Wagen, der autonom von sensorischen Informationen gesteuert wird", sagt Bishop. "Wir fragten uns, ob wir Mikroroboter mit Materialsensoren und -aktoren entwickeln könnten, die eher wie Bakterien navigieren."
Das Team von Bishop entwickelt einen neuen Ansatz zur Kodierung der autonomen Navigation von Mikrorobotern, der auf formwechselnden Materialien basiert. Lokale Merkmale der Umgebung, wie Temperatur oder pH-Wert, bestimmen die dreidimensionale Form des Partikels, was wiederum seine selbstfahrende Bewegung beeinflusst. Durch die Kontrolle der Partikelform und der Reaktion auf Umweltveränderungen modellieren die Forscher, wie Mikroroboter so konstruiert werden können, dass sie Reizgradienten nach oben oder unten schwimmen, auch solche, die zu schwach sind, um direkt von dem Partikel wahrgenommen zu werden.
"Zum ersten Mal zeigen wir, wie reaktionsfähige Materialien als Bordcomputer für Mikroroboter verwendet werden können, die kleiner als die Dicke eines menschlichen Haares sind und so programmiert sind, dass sie autonom navigieren", sagt Yong Dou, Mitautor der Studie und Doktorand im Labor von Bishop. "Solche Mikroroboter könnten komplexere Aufgaben wie die verteilte Erfassung von Materialfehlern, die autonome Lieferung von therapeutischer Ladung und die bedarfsgerechte Reparatur von Materialien, Zellen oder Geweben übernehmen."
Das Team von Bishop baut nun Experimente auf, um ihre theoretische Navigationsstrategie für Mikroroboter unter Verwendung von formwechselnden Materialien wie Flüssigkristall-Elastomeren und Formgedächtnislegierungen in der Praxis zu demonstrieren. Sie erwarten, dass die Experimente zeigen, dass stimulierend reagierende, formwechselnde Mikropartikel durch konstruktives Feedback zwischen Wahrnehmung und Bewegung autonom navigieren können.
Hinweis: Dieser Artikel wurde mit einem Computersystem ohne menschlichen Eingriff übersetzt. LUMITOS bietet diese automatischen Übersetzungen an, um eine größere Bandbreite an aktuellen Nachrichten zu präsentieren. Da dieser Artikel mit automatischer Übersetzung übersetzt wurde, ist es möglich, dass er Fehler im Vokabular, in der Syntax oder in der Grammatik enthält. Den ursprünglichen Artikel in Englisch finden Sie hier.
Originalveröffentlichung




Weitere News aus dem Ressort Wissenschaft
























































